引言:摆脱对规则的依附——全场景视觉AI领航高阶自动驾驶
高阶自动驾驶(L3/L4级别)正在步入前所未有的快速渗透期。在这一进程中,城区的复杂长尾场景(Corner Cases)——如倾斜翻倒的垃圾桶、散落的硬纸箱、低矮的宠物或突然降下的道路隔离栏,成为了横亘在所有智能系统面前的“夺命险峰”。传统的 3D 目标检测网络需要依赖庞大的三维边界框(Bounding Box)训练集,这意味着如果模型在训练阶段从未见过“倾倒并流出液体的环卫清洁车”,它就极易将该障碍物完全漏检,导致车辆发生严重的碰撞事故。
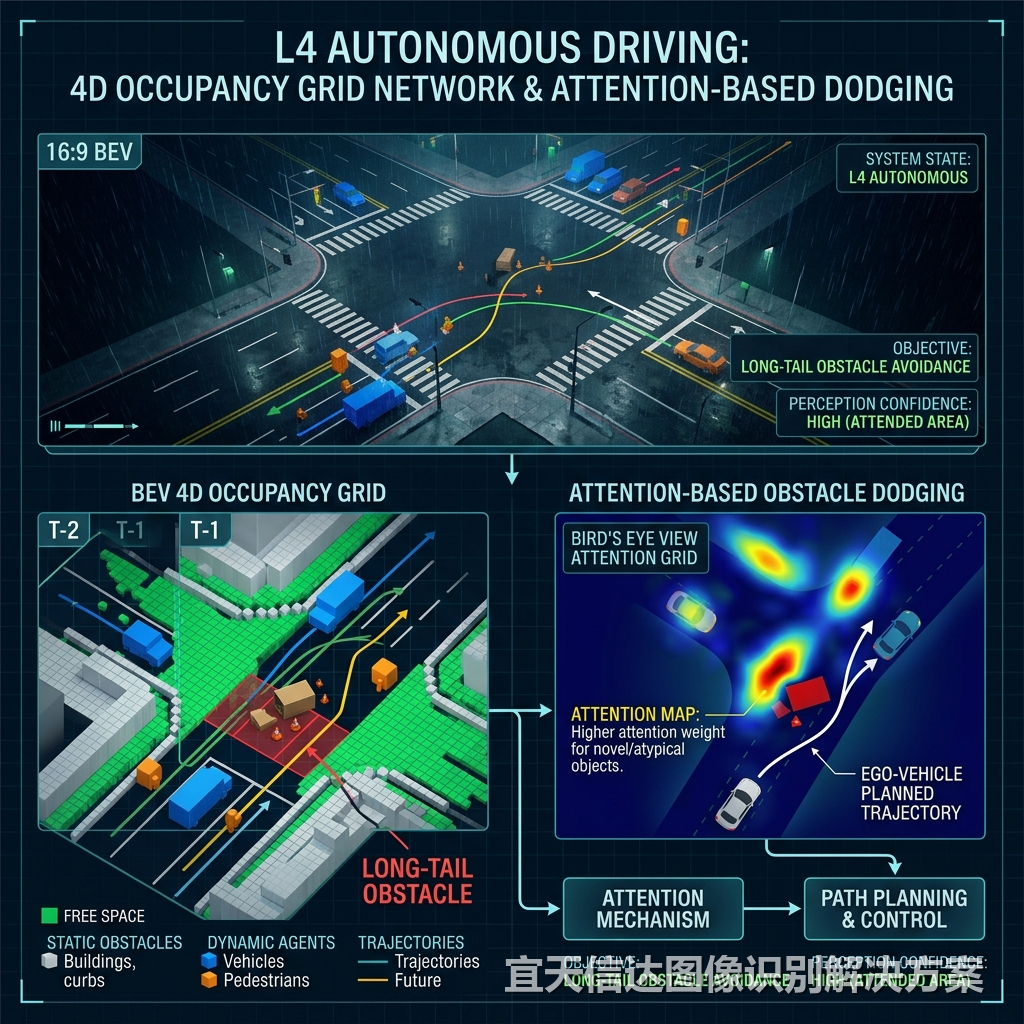
为了终结高难度长尾场景带来的接管故障,OpticCore 技术研发团队在车载域控制器上深度部署了“时空 4D 占有网格网络(Spatial-Temporal 4D Occupancy Grid Network)”。该系统不再关心眼前的障碍物“叫什么名字(属于什么分类)”,而是聚焦于这个物理空间“是否被实体占据(是否可供通车)”,从而对不规则和未知物体实现了高精度的降维打击,为行业树立了高安全 自动驾驶视觉方案 的最新范式。
一、 核心挑战:自动驾驶纯视觉占据感底层的阻碍
自动驾驶对感知算法的稳定性、实时性和延迟有着绝对苛刻的要求:
- 深度预测的内在多义性:将多枚单目二维高清摄像头像素还原至真实的 3D 物理空间坐标,在没有激光雷达的辅助下,极其容易在距离预测上产生严重的震荡抖动。
- 极端光照与伪影:隧道出入口的“亮盲”、雨雪夜间地面强烈的积水倒影、前车尾灯的剧烈眩光,会导致摄像头的图像发生局部过曝或噪点堆积,进而导致占据网格发生假阳性误判。
- 时序一致性(时空记忆):车辆高速移动时,动态障碍物在前后帧之间的空间拓扑关系极易发生撕裂,需要系统在没有高延迟的前提下具备高精度的时间维度连续特征追踪能力。
二、 方案对比:传统 3D 目标检测 vs. OpticCore 4D 占据网络
以下表为例,对比了目前主流的目标检测路线与 OpticCore 车规级占据网络感知的实测性能:
| 评估维度 | 传统基于边界框 3D 检测算法 (如普通 YOLO-3D) | OpticCore 时空 4D 占据网络方案 |
|---|---|---|
| 未知/不规则形状障碍物漏检率 | 高达 14.8% (特别是垃圾桶、倒落交通标牌等) | 低于 0.8% (聚焦空间物理实体占据状态) |
| 雨雪及强倒影环境下的感知抖动 | 距离预测频繁出现突变与前后帧“闪烁” | 极其稳定 (4D时序注意力平滑约束机制) |
| 端到端车载推理计算延迟 (mS) | 60 ~ 80 ms (复杂图像拼接和多任务调度开销) | 低于 22 ms (针对国产信创车规芯片指令调优) |
| 极端长尾 Corner Case 应对能力 | 频频发生接管或紧急刹停,对未知形状泛化极差 | 零接管通过 (融合 VLM 大模型实现开集障碍筛查) |
三、 技术实现:BEV时空注意力融合与车载芯片加速的深度解析
自研技术团队针对占据网络的高开销算力需求,实现了从底层指令集到上层语义提取的深度适配与网络重构。
3.1 时空 4D 占据编码器(Temporal 4D Occupancy Encoder)
多路环视摄像头提取的图像在主干网络后,通过视角变换层投影到鸟瞰图(BEV)三维体素网格空间中。我们在网格的隐空间中增加了一个具有时间窗口的时序循环注意力机制(Temporal Recurrent Attention)。系统保留前数秒的特征激活值,通过在 z 轴与时间轴施加自适应流阻惩罚,平滑预测由于前车遮挡或强倒影造成的短暂信号丢失。这不仅提供了极高稳定的 行人识别 与车道线轨迹脑补能力,更使系统获得了老司机一般的“防御性空间感知本能”。
3.2 国产车规信创芯片指令重构
为了在大规模量产车型上进行低成本落地,我们在昇腾智驾芯片上实施了极致的 离线 SDK 部署。通过重新设计 CUDA-like 底层矩阵乘法核(GEMM)以及定制多维张量转置算子,消除了在转换 BEV 空间时带来的频繁显存拷贝开销。这一优化将占据网格的计算效率提升了 3.2 倍,单帧计算时间压减到了 18 毫秒以内,使得纯视觉方案可以完全胜任高速 120km/h 状态下的毫秒级动态避障安全响应。
四、 实战案例:某新能源整车厂高级 NOA 智驾系统量产实测
国内某领先的新能源造车新势力,为了提升其旗舰轿跑在城市无图 NOA 领航下的通过率,迫切需要攻克旧方案在复杂施工路段频频紧急刹车与擦碰护栏的工程死穴。经过深度方案比对,该公司引入了 OpticCore 联合定制的车载时空 4D 占据网络感知中枢。
该系统完全脱离高精地图,利用 11 颗超清环视摄像头在车载信创智驾域控制器内进行端到端纯视觉占据推理。在多达百万公里的恶劣暴雨、逆光隧道和杂乱无标线施工路口的实车路测中,系统对于突发散落的纸箱、侧倾的临时铁栅栏和乱窜的宠物,做到了 99.4% 的提前避让成功率,系统紧急接管率降低了九成,彻底改变了用户对“雨夜智驾不敢开”的固定偏见,成为该车企核心的技术壁垒。智能驾驶硬件厂商和系统集成商,若需获取详实开发资料,敬请通过 获取定制方案 取得与首席算法专家的面对面技术交流。