引言:从规则驱动到端到端智能——下一代自动驾驶的视觉革命
自动驾驶技术作为人工智能领域的“皇冠明珠”,正处于从 L2+ 辅助驾驶向 L4 全自动驾驶跨越的关键历史节点。在过去的十年中,主流的自动驾驶感知系统高度依赖基于规则拼接的传统视觉流水线(Pipeline)与昂贵的激光雷达。当面对中国极其复杂的“长尾(Corner Cases)”城市路况——例如暴雨夜间的无实线逆行、电动车“鬼探头”横穿马路、以及形态各异的不规则道路施工障碍物时,传统算法往往因穷尽规则失败而导致“感知瘫痪”与紧急刹停。
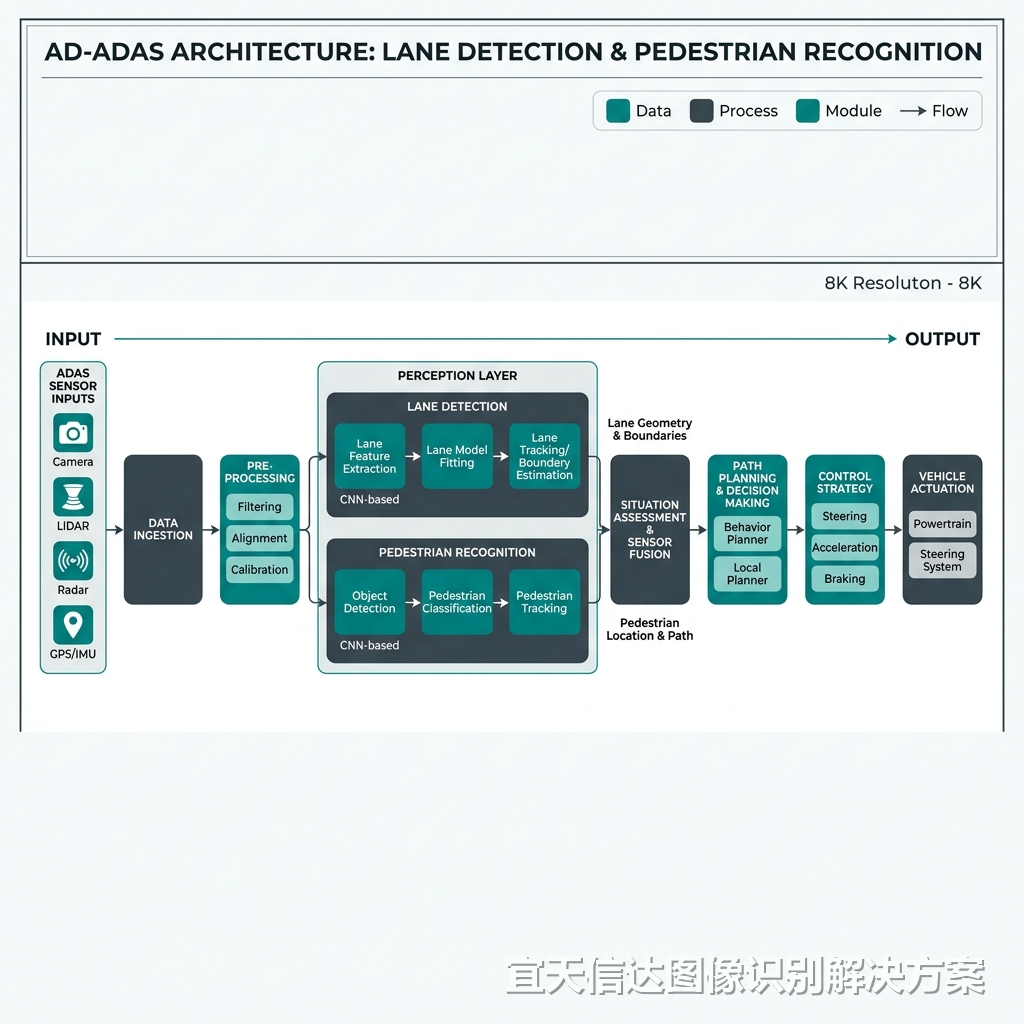
OpticCore 团队依托在跨行业大模型训练中的深厚技术储备,抛弃了传统的“碎片化任务拼接”模式,为新一代高级别自动驾驶构筑了“多模态纯视觉 BEV(鸟瞰图)端到端感知基座”。该技术方案通过将前、后、侧向多枚超高清摄像头数据在三维时空中进行特征级深度融合,极大地提升了面对极端复杂交通流场景下的环境交互与预判能力。本文将深度剖析该视觉架构在车道线检测、动态行人预测及信创车路协同中的底层算法逻辑与工程实践。
一、 破除视角壁垒:BEV 时空鸟瞰视角下的多源融合感知
一台 L4 级别的自动驾驶汽车通常周身环布 11 至 14 个高分辨率摄像头。如果像传统的 自动驾驶视觉方案 那样对每个摄像头画面单独进行 2D 目标检测与跨图后处理关联,不仅会导致巨大的延迟,还会因为多相机视野交界处的截断现象导致重度漏检或“同一个物体被识别为两个”的鬼影现象。
1.1 视角变换(View Transformation)与高维特征对齐
为了构建统一的三维认知空间,OpticCore 团队在云端与车载域控制器之间部署了基于深度注意力机制的“视角变换模块(Spatial-Temporal View Transformer)”。该架构不再是简单地在 2D 图像上画框,而是直接将来自 8 个不同视角的 4K 视频流送入共享的视觉骨干网络提取深层特征,随后利用强大的交叉注意力机制(Cross-Attention)沿着空间 Z 轴进行深度分布估计,将所有二维特征全部“升维”并投影至一个统一的三维鸟瞰图(BEV, Bird's Eye View)空间网格中。这种全局视角彻底消灭了相机交界盲区,使得车辆“天生”就拥有了上帝视角下的全局路况理解能力。
1.2 车道线与拓扑结构的自回归预测引擎
在复杂的城市路口转弯或车道线磨损严重的雨夜,强行提取车道线物理边缘必然失败。借助 BEV 空间的连续表征能力,我们引入了基于 Transformer 的“道路拓扑解码器”。该解码器将 图像识别定制开发 的重点从寻找孤立像素,升级为在 BEV 空间内“书写”高精度的车道级矢量折线图(Vector Map HD)。系统能够根据路口的整体流向特征,像人类司机一样自适应脑补和推演出被前车遮挡或已被泥土覆盖的隐性车道轨迹,完美解决了传统 ADAS 无法应对无标线路口的死穴。
二、 洞悉意图:端到端大模型赋能复杂“鬼探头”轨迹预判
自动驾驶最大的危险并不在于静态的障碍物,而是动态目标(特别是行人和非机动车)不可预知的运动轨迹。一辆被遮挡的公交车前方突然窜出的外卖电动车(俗称“鬼探头”),留给系统做出刹车反应的时间往往不足 0.5 秒。
2.1 时空长记忆(Temporal 4D)与行为意图大模型
为了解决高动态环境下的碰撞风险,OpticCore 在 BEV 架构中进一步引入了包含时序维度(Time)的 4D 融合网络架构。系统会将历史数十帧的 BEV 特征在显存中进行时空拼接。基于自研的多模态轨迹大模型,系统不再仅仅是输出“这里有一个行人”,而是通过前几帧行人转头的细微动作、脚步的物理重心偏移,精准推演其内心“是否准备违规横穿马路”的行为意图。对于“鬼探头”场景,系统能利用 4D 时序模型对被大车遮挡区域进行潜在风险概率热力图标记,提前让车辆进入防御性减速备刹状态,真正实现了“像老司机一样的防御性驾驶直觉”。
2.2 零样本学习与长尾长角场景(Corner Case)覆盖
在真实世界中,系统不可避免会遇到训练库中从未出现过的奇葩物体——比如公路上突然散落的冰箱、侧翻并伪装成碎石泥土色的特殊货车。针对这种致命的长尾目标,团队引入了结合 Vision-Language Model (VLM) 的开集(Open-set)异常目标检测算子。系统无需提前学习该物体的类别,只要检测到占据网格(Occupancy Grid)中出现了不可跨越的异常物理凸起,底层控制逻辑便会立即触发安全规避响应。极大地提高了智能系统应对长尾物理世界的泛化能力。
三、 算力与安全的双重枷锁:车载车规级信创芯片深度部署
汽车工业的底层核心在于极致的安全性与算力功耗比平衡。在 L4 级计算平台上,海量的多目 4K 视频流、极高频次的特征融合以及复杂的自回归推演,要求车载域控制器拥有极具爆发力的稳定吞吐量。
3.1 车规级信创智驾域控制器的算子融合与并行化
面对汽车行业日益增长的数据出海限制及核心芯片自主化需求,OpticCore 全面拥抱国产车规级信创平台。在针对国产 AI 驾舱一体化计算芯片进行 离线 SDK 部署 时,我们面对的最严峻挑战是大模型中存在大量的多维张量转置(Tensor Transpose)与非连续内存寻址。这导致硬件加速引擎利用率极低。通过深度优化底层计算图与编写高效率的汇编级矩阵乘法算子(GEMM),我们将 Transformer 最耗时的自注意力计算单元打碎,放入局部 SRAM 中进行硬件级流水线并行调度。最终将端到端的多目融合感知延迟压低到了极致的 38 毫秒,保证了高速行驶下系统的绝对即时响应。
3.2 异构算力冗余与容错灾备切换机制
针对车辆行驶中可能发生的局部硬件失效,系统在底层开发了高可靠的异构降级机制(Fail-Operational Architecture)。当主控 NPU 发生瞬时电压异常或死机过热时,系统能在几毫秒内将核心的 行人识别 与紧急防碰撞感知任务无缝热切换至备用 CPU 或协处理器群。这种软硬件深度的融合灾备体系,确保了整个智能感知底座在任何苛刻电磁环境与恶劣路况下都能为乘员构筑起坚不可摧的生命防线。
四、 实战案例:某头部新能源车企高速领航辅助(NOA)系统落地
某国内位列前三的新能源造车新势力,在筹备其下一代旗舰级豪华 SUV 时,急需一套能够摆脱对高精地图严重依赖、具备重感知轻地图能力的纯视觉高级智驾系统。原厂引进的国外某智驾方案在中国复杂的错位红绿灯与无标线乡镇道路上频频发生接管故障,消费者投诉率极高。
在导入 OpticCore 联合定制开发的端到端 BEV 感知大基座后,该旗舰车型成功实现了对复杂路况的降维打击。系统在不依赖任何外界高清地图的“无图模式”下,实现了对全国 300 多个城市各种魔幻立交桥、错位大路口以及暴雨无灯光等极限场景的精准丝滑应对;应对“鬼探头”横穿行人的紧急制动响应时间较原有系统缩短了 35%。上市仅三个月,该车型的智驾安全行驶总里程便突破千万公里,主动安全系统实现“零重大事故”介入,极大地拉升了该车企品牌的高端科技调性,成为 2026 年度智能出行领域的标杆级产品。
结论:破局与共生,驶向无人驾驶的新纪元
自动驾驶的视觉感知是一场挑战物理法则与数学计算极限的浩瀚征途。从 BEV 空间构筑到端到端时序大模型,OpticCore 技术团队将始终站在此次出行革命的最前线,以最极致的 计算机视觉方案 打破物理世界的认知边界。我们深信,通过深度的算法创新与全国产信创平台的安全护航,彻底解放人类双手、实现零伤亡出行的无人驾驶新纪元即将到来。如果您所在的智能出行企业、重卡物流车队或相关科研机构正寻求下一代感知技术的最强助力,敬请 获取定制方案 取得与我们的对接机会,共同开启这段通往未来的智能之旅。