在 2026 年,自动驾驶技术正从实验室走向全场景商业化。无论是城市公开道路的无人出租车,还是封闭园区的物流配送车,自动驾驶视觉方案的性能边界正在被不断刷新。特别是 L4 级自动驾驶,对感知的实时性、鲁棒性以及复杂语义的理解力提出了近乎苛刻的要求。OpticCore 研发团队通过底层算子重构与动态视觉架构设计,正在重新定义“感知安全”的标准。
一、 场景挑战:为什么“看清”还不够?
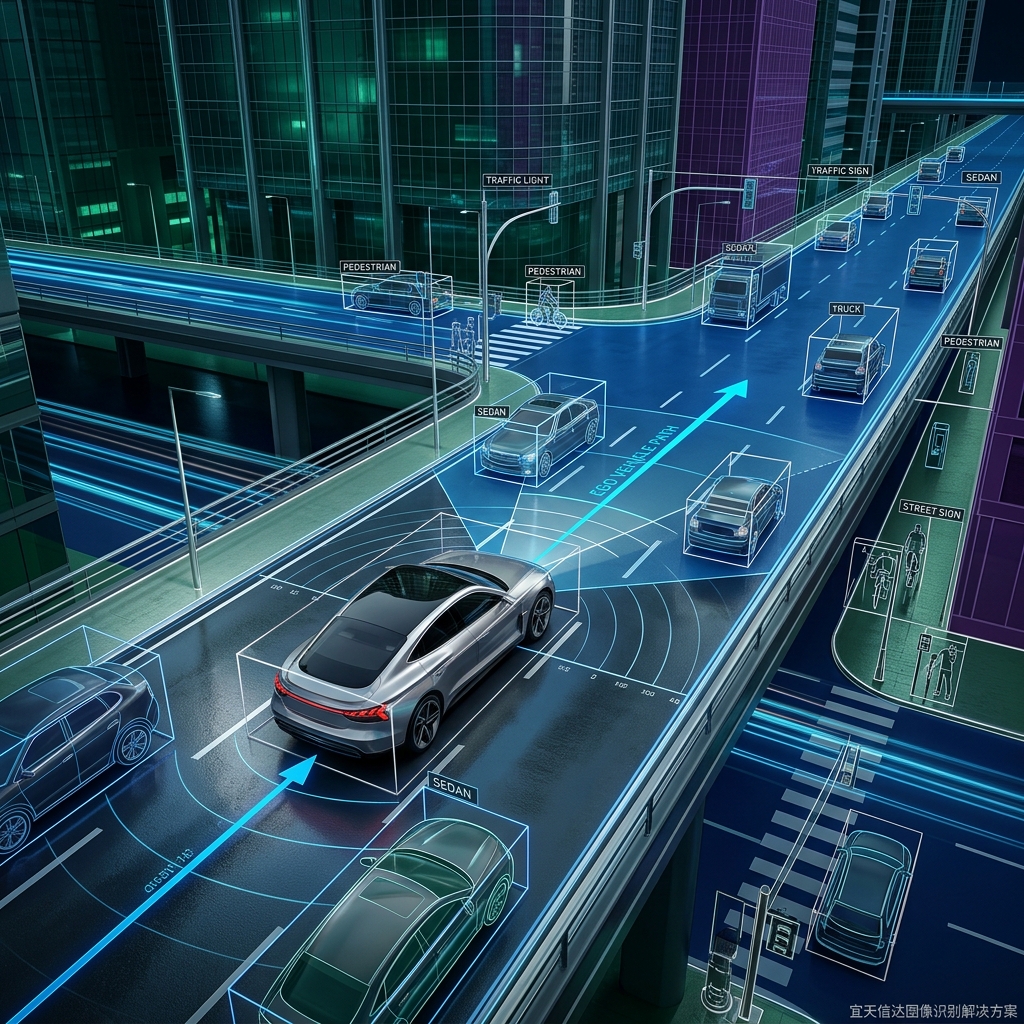
在复杂的真实交通环境中,仅仅依靠物体检测(Bounding Box)已经无法支撑高级别自动驾驶的决策。
- 光影剧变:进入或驶出隧道时的瞬时强光/低照度环境,往往导致传统摄像头过曝或细节丢失。
- 极端天气:强降雨或大雾带来的视觉噪点,使得传感器融合算法面临极大的不确定性。
- 长尾障碍物:马路上散落的纸箱、倒地的路障、甚至是一只快速穿过的小猫。这些非标准物体的识别精度,直接关系到行车安全。
传统方案在应对这些挑战时,往往因为计算量过大导致延迟增加,或者因为特征提取不够细致导致误触发紧急制动。
二、 方案对比:传统深度学习感知 vs OpticCore 动态架构
过去,主流方案采用统一权重的 CNN 或固定尺寸的 ViT 架构。
“我们需要一种能根据场景复杂度动态调整计算资源的‘智能视网膜’。” —— OpticCore 首席算法专家。
相比之下,OpticCore 的 动态视窗语义分割架构 (Dynamic-Window Semantic Segmentation) 具有显著优势:
- 传统方案:全局均匀计算,在空旷路段浪费算力,在复杂路口算力匮乏。
- OpticCore 方案:引入显著性检测,自动将 70% 的计算资源聚焦于可能出现风险的动态区域(如人行道边缘、盲区夹角),实现亚毫秒级的关键路径响应。
三、 底层技术原理:动态 ViT 与亚像素级融合
我们的核心突破在于将 动态 Vision Transformer (Dynamic ViT) 与 亚像素级特征融合 (Sub-pixel Feature Fusion) 深度整合。
通过引入 Token 稀疏化策略,系统可以自动剔除背景中无关的静态像素处理,从而在不损失精度的前提下,将推理速度提升了 40%。同时,亚像素级融合算法确保了即使在 100 米外,系统依然能够清晰分辨障碍物的轮廓边缘,为 自动驾驶视觉方案 提供了超视距的感知能力。
四、 落地案例:某 L4 级无人配送物流车的全天候实践
在与国内某知名物流企业的合作中,OpticCore 的感知系统被部署在超过 500 台无人配送小车上。在长达 18 个月的运行中,该系统经受住了南方梅雨季节和北方暴雪天气的严苛考验。
通过 图像识别定制开发,我们为客户优化了低速场景下的近距盲区检测。即使是位于车身死角的微小障碍物,系统也能实现 99.9% 的检出率,大幅降低了运行过程中的摩擦事故。
五、 迈向具身智能与多模态交互
未来的自动驾驶视觉将不再局限于避障。OpticCore 正在探索将视觉感知与 VLM(视觉语言模型)结合,使车辆能够理解“路边交警的手势”或“复杂的交通警示标语”。